Le projet
MEUST-NUMerEnv se base sur la synergie entre l’effort des physiciens
pour détecter et étudier les neutrinos et celui des océanologues,
bio-acousticiens, spécialistes du climat, et géophysiciens pour suivre
en temps réel et en continu les fonds marins et l’ensemble de la colonne
d’eau. Il bénéficie de la rupture technologique que fournit un réseau
de capteurs distribués connectés en temps-réel à une infrastructure
sous-marine haut-débit reliée à la côte de manière permanente par un
câble électro-optique. Il se base également sur l’excellence locale
démontrée en matière de technologie marine (câbles, navires, ROV) et des
scientifiques d’AMU, du CNRS et de l’Ifremer qui ont déployé et
exploité avec succès l’observatoire sous-marin ANTARES, en grande profondeur au large de Toulon.
Le projet est porté par le CNRS, en partenariat avec Aix-Marseille Université (AMU) et l’université de Toulon (UTLN) et
en concertation avec le Centre Européen des Technologies Sous-Marines
de l’Ifremer. Il bénéficie du soutien logistique de l’Ifremer et des
contributions de nos partenaires scientifiques européens de KM3NeT et d’EMSO (dont il sera le nœud Ligure). Il a été labellisé par le Pôle Mer Méditerranée et par le Ministère dans le cadre du CPER.
Le projet est financé par le Centre National de la Recherche Scientifique (CNRS), un Contrat de Plan État-Région (CPER) pour la région Sud, le Fond Européen de DEveloppement Régional (FEDER), la Délégation Régionale à la Recherche et à la Technologie (DRRT) pour la région Sud.
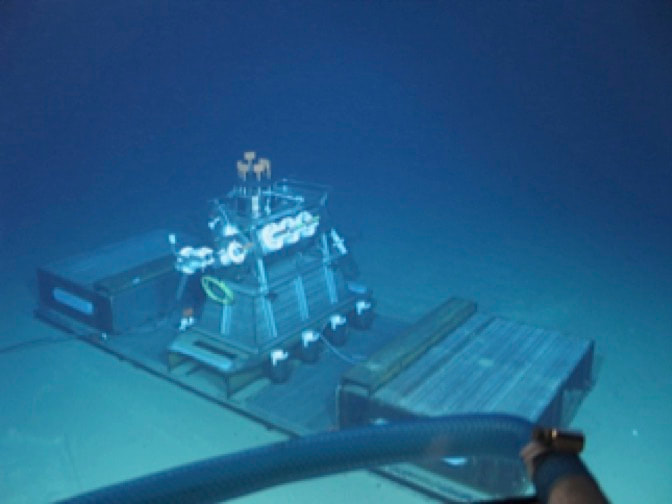
Boite de Jonction
Chaque
nœud permet de fournir la puissance électrique aux instruments qui y
sont connectés et de transférer leurs données vers la terre en temps
réel au travers du câble principal MEOC. Le cœur du nœud est constitué
d’une enceinte en titane résistante à la pression ambiante contenant un
transformateur électrique de Haute Tension à Moyenne Tension ainsi que
le contrôle du réseau de fibres optiques. Deux ensembles de quatre
connecteurs « wet mateable » permettent d’y raccorder les
instruments.
|

|
Boite de Jonction Secondaire
la BJS permettra
d’étendre de façon importante les capacités d’interfaçage d’instruments
pluridisciplinaires. En particulier, le sismographe, le robot
« crawler », la nouvelle biocaméra et le capteur de
radioactivité seront connectés à la BJS pendant la troisième année du
projet.
La BJS est réalisée et gérée par l’Ifremer. |
|
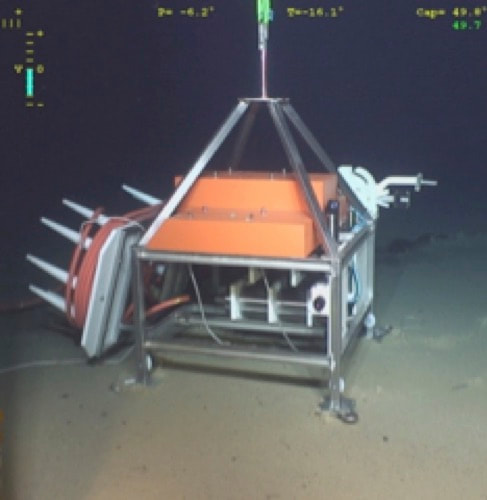
Module d’Interface Instrumenté
.Le
MII a ainsi servi d’interface à différents capteurs et instruments
: mesure de turbidité, mesure d’oxygène, courantomètre, biocaméra,… En
2013, le MII a été récupéré afin d'être adapté pour une utilisation dans
le MEUST-Phase 1. Il intègre en particulier un modem acoustique qui est
utilisé pour la lecture des différents capteurs déployés sur la ligne
autonome ALBATROSS.
|
|
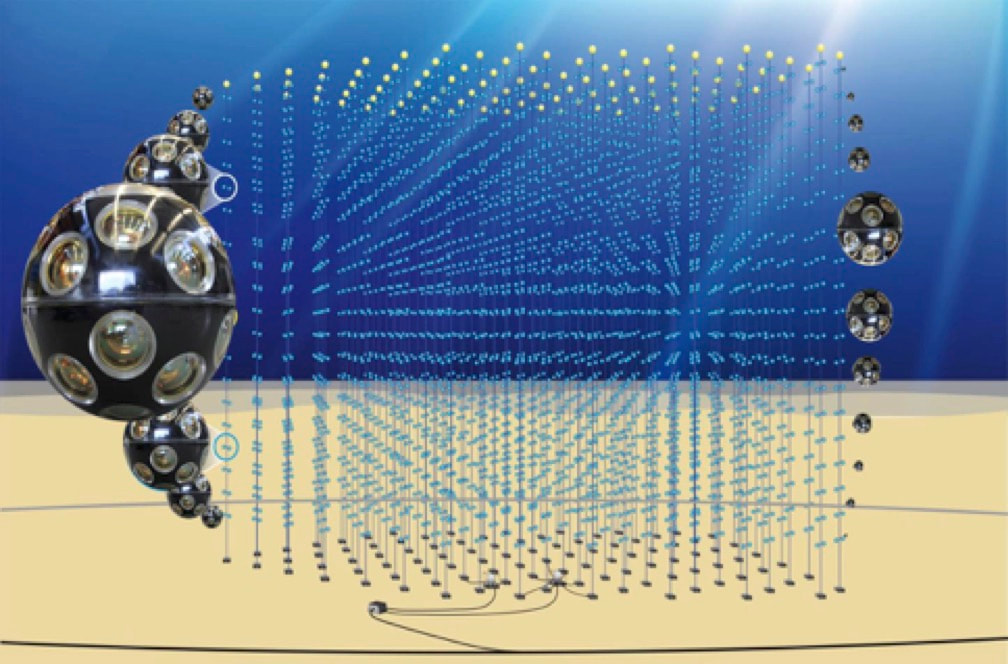
Lignes Neutrino
les
capteurs de lumière et son, avec leur électronique de lecture, sont
inclus dans des sphères de verre résistantes à la pression ambiante, Ces
DOMs sont répartis en réseau tridimensionnel le long de lignes
flexibles ancrées au fond de la mer et maintenues verticales par une
bouée de tête. Les temps de détection de chaque photon de lumière sont
mesurés avec une précision inférieure à la nanoseconde. Les bruits
acoustiques sont numérisés par un ADC de 24 bits à une fréquence de 195
kHz. Ce concept de lignes de détection constitue une architecture
modulaire facilitant une implémentation progressive et distribuée.
|
|
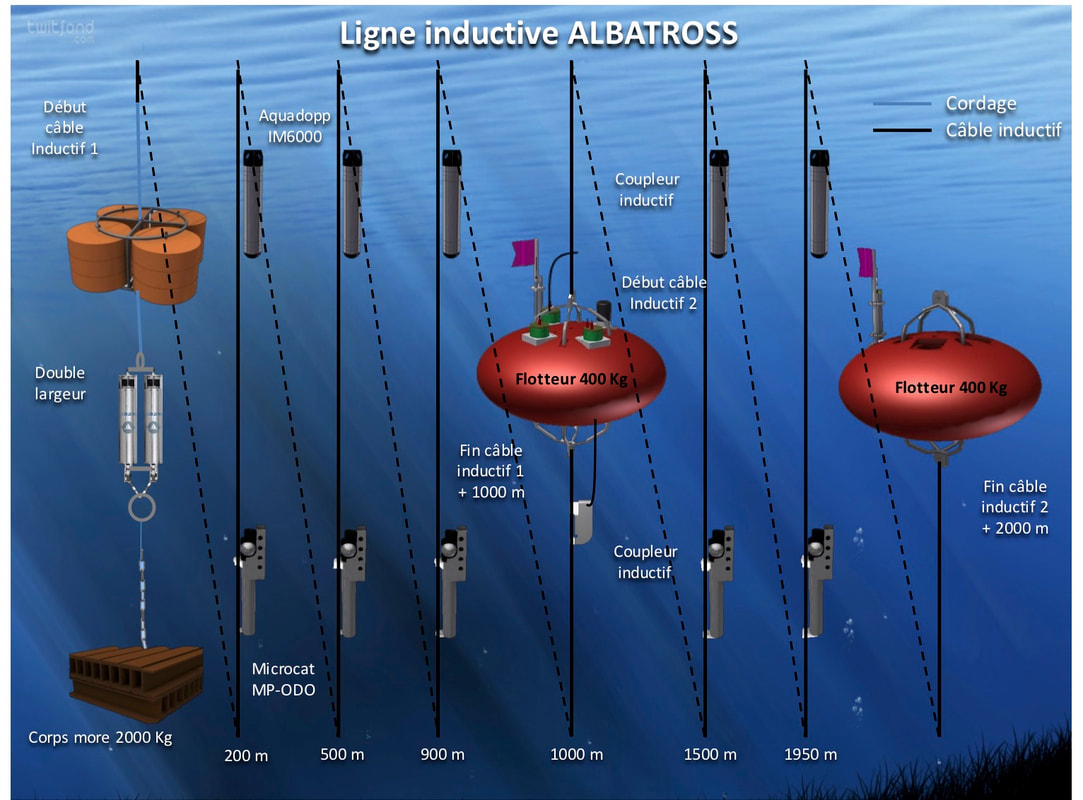
Ligne Albatross
Dans
le cadre du programme européen EMSO, ALBATROSS (Autonomous Line with a
Broad Acoustic Transmission for Research in Oceanography and Sea
Sciences) est une ligne de mouillage instrumentée dédiée aux sciences
environnementales qui a pour objectif de d’apporter des éléments de
réponse sur l’impact du réchauffement climatique sur les océans, et
aussi à l’étude des écosystèmes marins profonds dans une optique de
recherche fondamentale en s’intéressant particulièrement aux facteurs
anthropogéniques et climatiques.
|
|
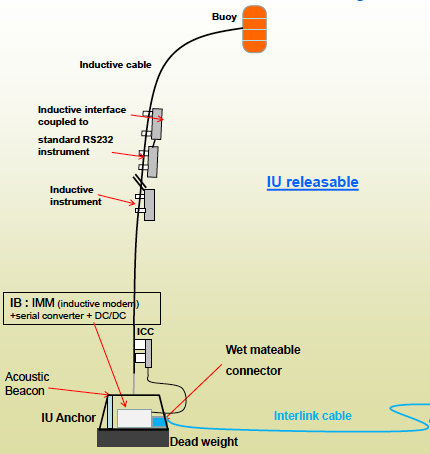
Unite d'Instrumentation Environnementale
Cette
ligne permettra d’obtenir des séries temporelles de la pression,
température, salinité et des courants marins sur une colonne d’eau de
250m à partir du fond marin. La ligne sera instrumentée sur 3 niveaux
avec chaque niveau un ensemble d’instruments et sera complémentaire de
la ligne ALBATROSS déployée à plusieurs
kilomètres. Le pied de ligne sera connecté à l’infrastructure pour
l’alimentation et le transfert des données. La structure porteuse de la
ligne de mouillage est un câble inductif sur lequel l’instrumentation,
compatible avec ce mode de communication, sera connectée pour
transmettre les données en temps réel.
|
|
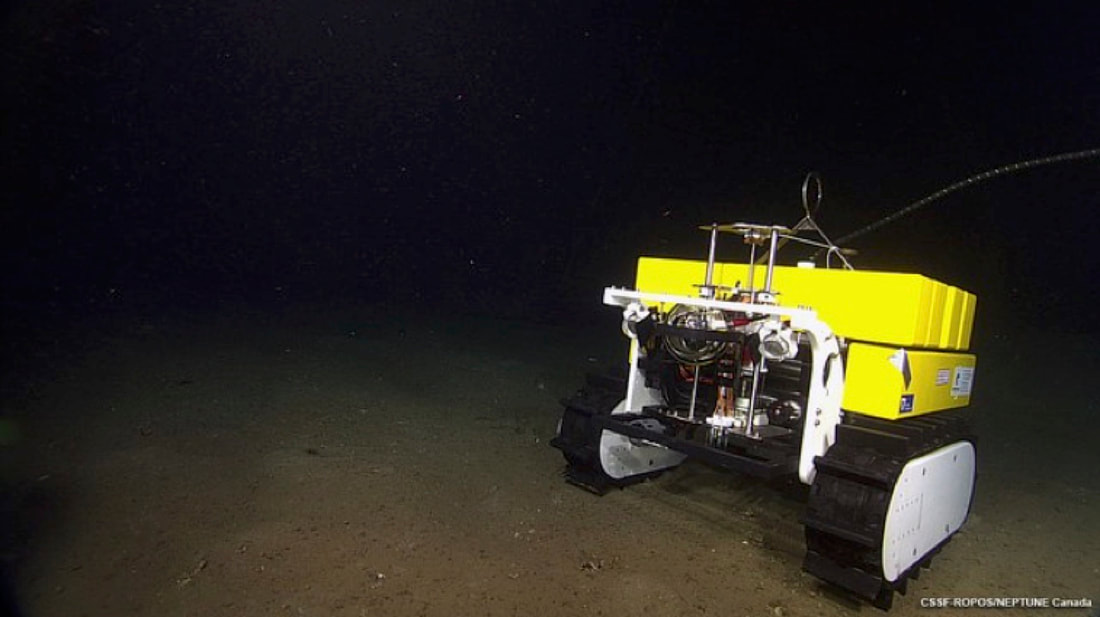
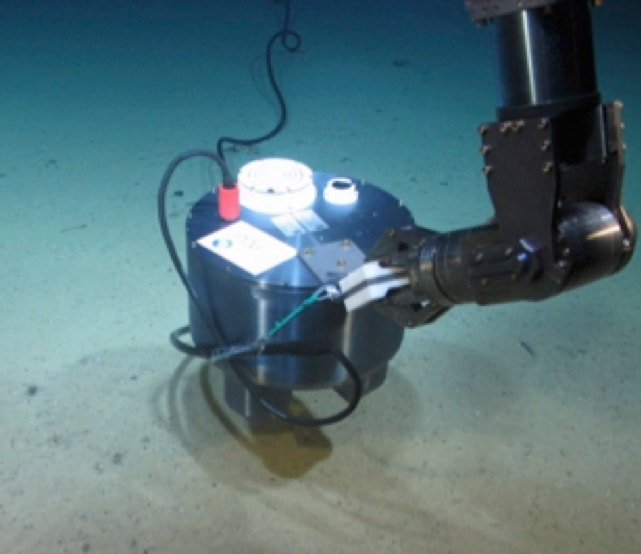
Robot Benthique
Le robot benthique
semi-autonome est un véhicule contrôlé à distance permettant de mettre
en œuvre plusieurs sondes ou analyseurs du système benthique profond.
Ces multi-capteurs permettent de mesurer la température, la pression, le
courant, la salinité, la concentration en méthane et la turbidité. Il
possède également la capacité d’intégrer d’autres capteurs tels qu’une
caméra pour l’acquisition d’images vidéo de la faune benthique ou encore
d’un détecteur de photons pour la surveillance d’organismes
bioluminescents.
|
|
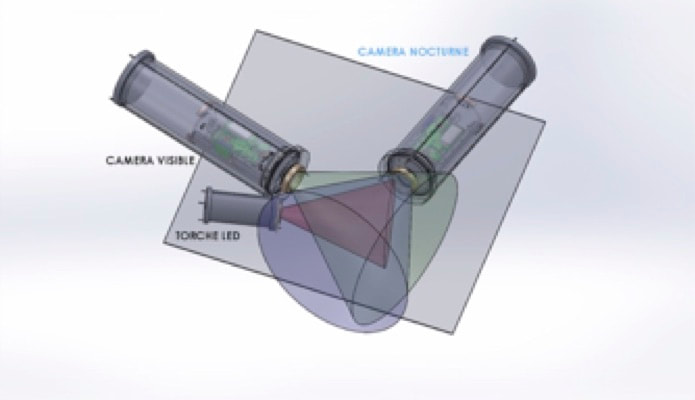
Biocamera
La
Biocamera a pour contexte l’observation de la bioluminescence marine
spontanée ou déclenchée des espèces des grands fonds marins. Le système
d’imagerie déporté et programmable devra acquérir et transférer à terre
des informations pour chaque observation spatiale, temporelle,
spectrale, illumination active/passive. Le système de photo-détecteurs
interconnectés sera constitué de deux capteurs photoniques sensibles à
une quantité de lumière très faible.
|
|
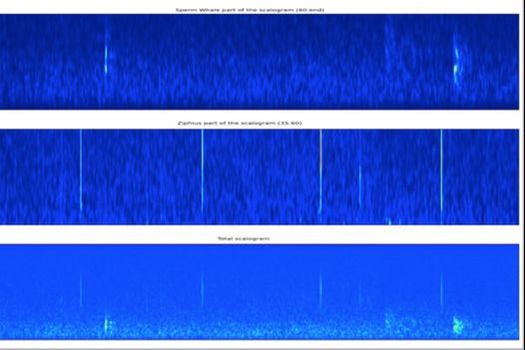
Un Système Bioacoustique
Un
système bioacoustique comprend des détecteurs et des indexeurs
automatiques en temps réeel pour les bruits émis par les cétacés,
mammifères marins de l'écosystème méditerranéen, à partir des signaux
des lignes équipées d’hydrophones Haute et Basse Fréquence du détecteur
ORCA connecté sur l’infrastructure sous-marine. Ce détecteur offrira en
effet un important réseau tridimensionnel de capteurs acoustiques larges
bandes installés entre 2000 et 2500 mètres de profondeur. L'équipe
DYNI de l'université de Toulon complétera ses détecteurs automatiques
de cétacés performants, sur la base de son savoir-faire en détection et
classification automatique de cétacés.
|
|
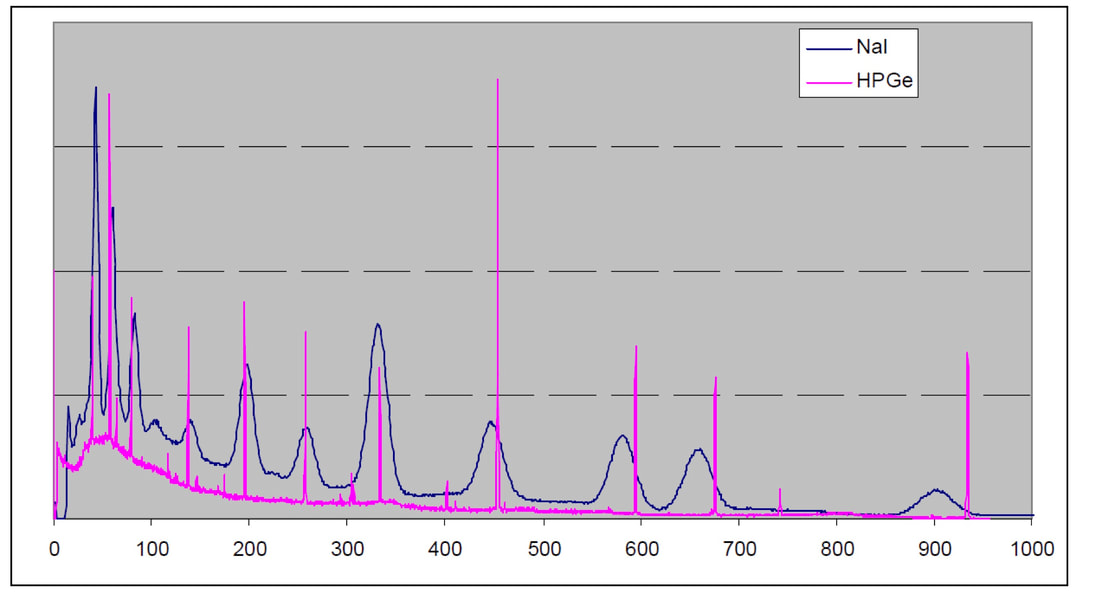
Capteur de Radioactivite
Au-delà
de certains aspects de recherche fondamentale liés à la physique et la
chimie des océans, la radio-métrologie marine permet d’étudier l’impact
de l’industrie nucléaire et d’autres activités annexes et dont
l’accident de Fukushima est le plus récent et claire exemple. La
présence et l’évolution temporelle d’isotopes comme le 137Cs, 60Co,
90Sr, entre autres, est un indicateur de première importance pour
comprendre la répercussion des activités anthropogéniques dans le milieu
marin.
|
|
Seismographe
Une
équipe du Laboratoire Géosciences-Azur de l’Observatoire de
Villefranche-sur-Mer a profité de la BJS pour installer un sismographe
large bande sur le site. L’acquisition en temps réel des données
sismologiques de ce capteur permet en outre une première extension en
mer du réseau de surveillance sismique de la côte provençale ainsi
qu’une meilleure triangulation du foyer des séismes enregistrés.
|
|






